
Types of Servo Motor
DC Servo Motor

AC Servo Motor

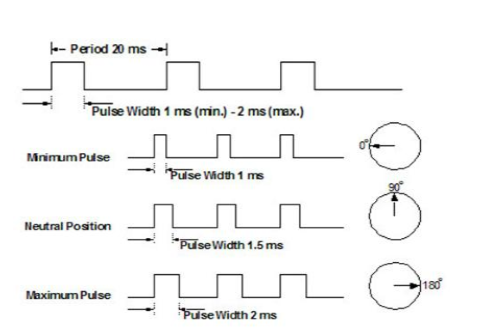
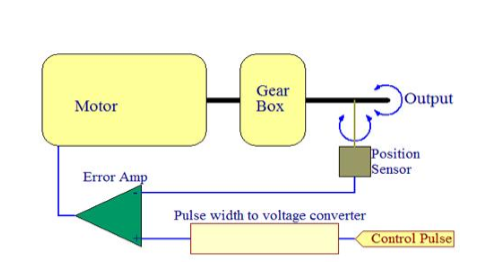
Basic working concept of servo motors
Applications
/* Name : main.c
* Purpose : Source code for SERVO MOTOR Interfacing with PIC18F4550.
* Author : Gemicates
* Date : 2017-06-22
* Website : www.gemicates.org
* Revision : None
*/
#include<xc.h> // Header file for PIC18F4550
#define _XTAL_FREQ 12000000 // 12MHZ
void delay_ms();
void delay_us();
unsigned int i;
void main()
{
CMCON = 0x07; // To turn off comparators
ADCON1 = 0x0F; // A/D control register
TRISC = 0x00; // PORTC as output
while(1) {
for(i=0;i<49;i++) // rotate to 0 degree
{
PORTCbits.RC0=1;
__delay_us(900);
PORTCbits.RC0=0;
__delay_us(19100);
}
__delay_ms(20); // delay for 0.02 sec
{
for(i=0;i<49;i++) // rotate to 45 degree
{
PORTCbits.RC0=1;
__delay_us(1250);
PORTCbits.RC0=0;
__delay_us(18750);
}
__delay_ms(20); // delay for 0.02 sec
{
for(i=0;i<49;i++) // rotate to 90 degree
{
PORTCbits.RC0=1;
__delay_us(1500);
PORTCbits.RC0=0;
__delay_us(18500);
}
__delay_ms(20); // delay for 0.02 sec
{
for(i=0;i<49;i++) // rotate to 1350 degree
{
PORTCbits.RC0=1;
__delay_us(1750);
PORTCbits.RC0=0;
__delay_us(18250);
}
__delay_ms(20); // delay for 0.02 sec
{
for(i=0;i<49;i++) // rotate to 180 degree
{
PORTCbits.RC0=1;
__delay_us(2000);
PORTCbits.RC0=0;
__delay_us(18000);
}
__delay_ms(20); // delay for 0.02 sec
}
}
}
}
}
}